1、六足步行机器人 #
又叫蜘蛛机器人,是多组机器人的一种,通过拟态自然界昆虫–蜘蛛,而搭建的机器人模型。足是昆虫的运动器官。昆虫有3对足,在前胸、中胸和后胸各有一对,相应地被称为前足、中足和后足。行走是以三条腿为一组进行的,即一侧的前、后足与另一侧的中足为一组。这样就形成了一个三角形支架结构,当这三条腿放在地面并向后蹬时,另外三条腿即抬起向前准备替换。 前足用爪固定物体后拉动虫体向前,中足用来支持并举起所属一侧的身体,后足则推动虫体前进,同时使虫体转向。 这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。并不是所有成虫都用六条腿来行走,有些昆虫由于前足发生了特化,有了其他功用或退化,行走就主要靠中、后足来完成了。 比如螳螂了,我们常可看到螳螂一对钳子般的前足高举在胸前,而由后面四条足支撑地面行走。
在自然界和人类社会中存在一些人类无法到达的地方和可能危及人类生命的特殊场合。如行星表面、灾难发生矿井、防灾救援和反恐斗争等,对这些危险环境进行不断地探索和研究,寻求一条解决问题的可行途径成为科学技术发展和人类社会进步的需要。地形不规则和崎岖不平是这些环境的共同特点。从而使轮式机器人和履带式机器人的应用受到限制。以往的研究表明轮式移动方式在相对平坦的地形上行驶时,具有相当的优势运动速度迅速、平稳,结构和控制也较简单,但在不平地面上行驶时,能耗将大大增加,而在松软地面或严重崎岖不平的地形上,车轮的作用也将严重丧失移动效率大大降低。为了改善轮子对松软地面和不平地面的适应能力,履带式移动方式应运而生但履带式机器人在不平地面上的机动性仍然很差行驶时机身晃动严重。与轮式、履带式移动机器人相比在崎岖不平的路面步行机器人具有独特优越性能在这种背景下多足步行机器人的研究蓬勃发展起来。而仿生步行机器人的出现更加显示出步行机器人的优势。

多足步行机器人的腿部具有多个自由度使运动的灵活性大大增强。它可以通过调节腿的长度保持身体水平也可以通过调节腿的伸展程度调整重心的位置因此不易翻倒稳定性更高。当然多足步行机器人也存在一些不足之处。比如为使腿部协调稳定运动从机械结构设计到控制系统算法都比较复杂相比自然界的节肢动物仿生多足步行机器人的机动性还有很大差距。
2、互动思考:四条腿的动物是如何行动的,和三角步态有和异同? #
3、六足步行机器人搭建和介绍 #
带领小朋友制作六足步行机器人模型,引导小朋友说出使用哪些积木颗粒,模拟了蜘蛛的哪些部分结构,实现了哪些功能。
4、理论知识 #
知识点1:三角步态:
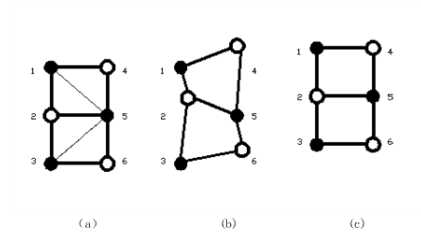
六足步行机器人的步态是多样的,其中三角步态是六足步行机器人实现步行的典型步态。 “六足纲” 昆虫步行时,一般不是六足同时直线前进,而是将三对足分成两组,以三角形支架结构交替前行。目前,大部分六足机器人采用了仿昆虫的结构,6条腿分布在身体的两侧,身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架,依靠大腿前后划动实现支撑和摆动过程,这就是典型的三角步态行走法。
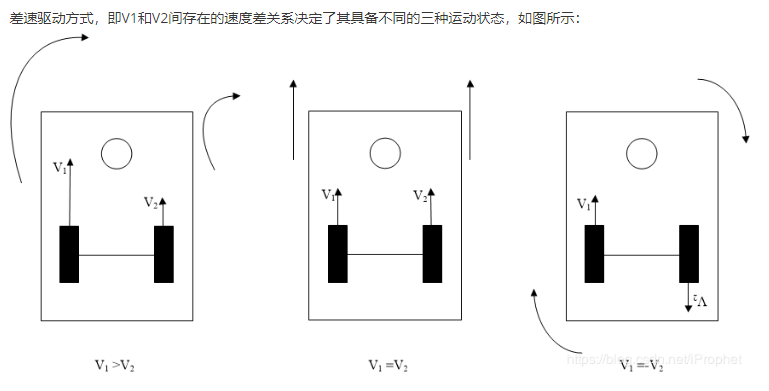
知识点2:差速运动控制
通过前面的后驱汽车章节的学习,我们可以知道,常见的后驱车,后边的两个车轮转动提供整个汽车运动的动力,前边的两个车轮起着支撑和转向的作用,当两个前轮速度相同时,汽车直行,当左边车轮转速超过右边时,汽车右转,相对应的情况下,汽车左转,见下图。当汽车两个前轮转速不一样时,可实现转向功能,这就是差速运动控制。
5、模拟面试
问题1:六足机器人的运动方式
六足机器人的运动方式为三角步态,三角步态就是六足机器人的六只足分成了两组,组成两个三角支架
问题2:六足机器人的转向原理
六足机器人的转向原理为差速转向,差速转向是指两侧速度不同,有速度差而产生转向的方式。
问题3:除以上两个知识点,模型中还应用了哪些理论
涡轮蜗杆机构:蜗杆上有和螺丝上相似的螺旋,螺旋转动时会带动涡轮转动。
连杆机构:几根长杆连接在一起,由主动杆一次带动,最终带动输出杆的运动。



