1、 Ps2操纵杆简介 #
操纵杆是一种输入设备,由一根可在基座上旋转,并向其控制的设备报告其角度或方向的操纵杆组成。基本原理是将操纵杆的运动转化成计算机能够识别的数字语言。
该模块有由两个模拟输出(对应x和y坐标)和一个数字输出,表示是否在Z轴上按下。
在本实验中,我们将引脚VRx和VRy连接到控制主板的模拟输入端口,以便将模拟量转换为数字量。 实验使用的双轴按键摇杆控制器,十字摇杆为一个双向的10K电阻器,随着摇杆方向不同,抽头的阻值随着变化。本模块使用5V供电,遥感在水平和竖直方向二维空间移动时,引脚vrx和xry相应输出0~1023数值到模拟输入端口,按键表示用户是否在ž轴上按下,通过sw针脚输出0或者1变量到控制板的数字输入端口,用ps2操纵杆可以轻松控制物体(如二自由度舵机云台)在二维空间运动。

2、 互动思考:Ps2操纵杆的应用 #
操纵杆通常用于控制视频游戏和机器人。由于操纵杆有很好的连续性能够比较好的控制游戏人物或者机器人移动。

3、 所需元件清单 #
Arduino Uno主板
USB数据线
Ps2操纵杆
面包板
9V电池
杜邦导线
4、 动手实验 #
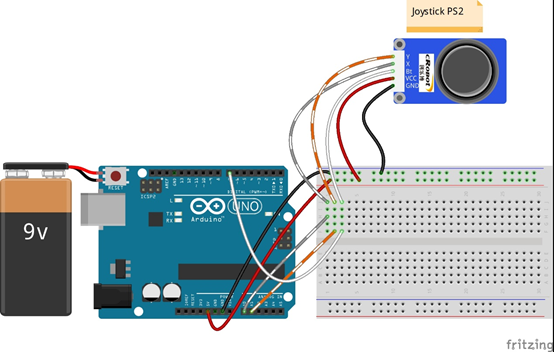
将ps2操纵杆正确连结控制板,摇动或者按下操纵杆,将实验结果输出到串口显示区域
A实验接线图
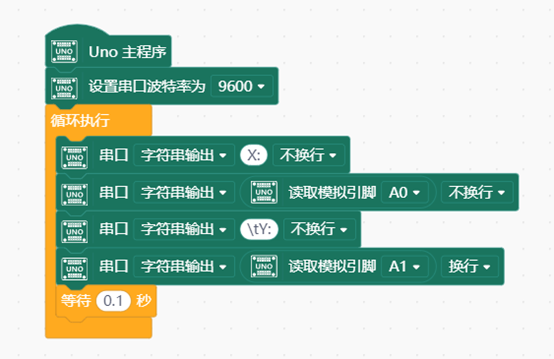
B实验程序图
5拓展训练 #
实验2:设计使用ps2操纵杆控制RGB灯,不同的操纵杆位置显示不同的rgb混合颜色
实验3:设计操纵杆控制七彩led闪动频率的实验



