1、 红外避障传感器简介 #
红外避障主要是以红外测距传感器为主。红外测距都是采用三角测距的原理。红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,检测到反射光之后,通过结构上的几何三角关系,就可以计算出物体距离q。
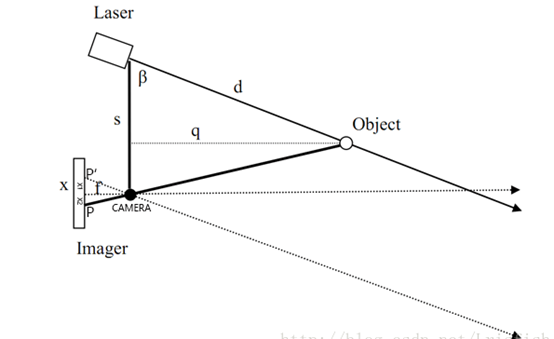
当q的距离足够近的时候,上图中β值会相当大,如果超过传感器的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离q很大时,β值就会很小,测量量精度会变差。因此,常见的红外传感器 测量距离都比较近,小于超声波,同时远距离测量也有最小距离的限制。另外,传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键,对于透明的或者近似黑体的物体,红外传感器是无法检测距离的。
本实验中,传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口OUT输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,电位器顺时针调整,检测距离增加,逆时针调整检测距离减少;工作电压为3.3V-5V。

2、 互动思考:循迹传感器的应用 #
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
3、 所需元件清单 #
Arduino Uno主板
USB数据线
红外避障传感器
面包板
9V电池
杜邦导线
4、 动手实验
#
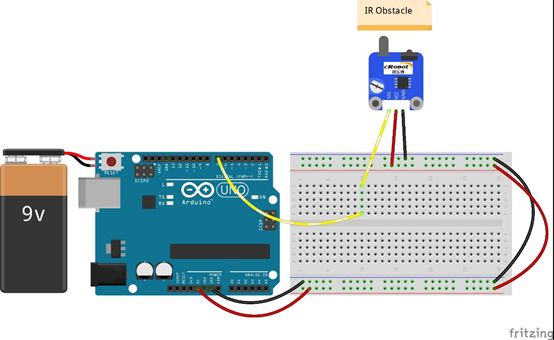
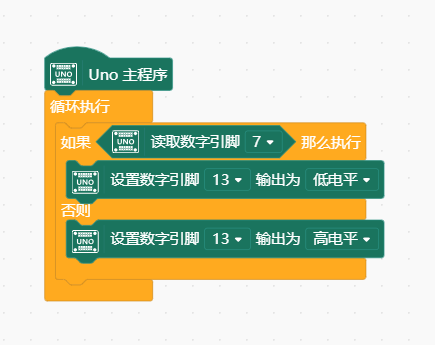
参照下图正确接线,编写程序使得,装置接近障碍物时,数字端口13附近LED灯点亮。
A实验接线图
B实验程序图
5拓展训练 #
实验2:利用本传感器,设计一个与障碍物蜂鸣器告警,七彩灯闪烁的实验



