1、 舵机简介 #
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。常见的舵机由两种不同的动力方式:电动舵机和液压舵机。

舵机利用啮合齿轮驱动角度转动,利用PWM(脉冲宽度调制信号)来控制角度大小,可以通俗的理解成利用通电时长控制角度转动大小,例如通电三秒舵机转动180度,如果想要控制舵机指针转动60度,即通电时间为1秒,如此类推。
本课所用舵机有三根导线,棕色接GND,红色接VCC,橙色是信号线接数字引脚。

2、 舵机的应用 #
舵机在工业上广泛用于航空航天事业中,控制飞行角度,以及船舶上控制航向,流水线上各类智能手臂的精细化控制,以及玩具航模、小汽车的方向控制。
3、 所需元件清单 #
Arduino Uno主板
USB数据线
舵机
面包板
9V电池
杜邦导线
4、 动手实验 #
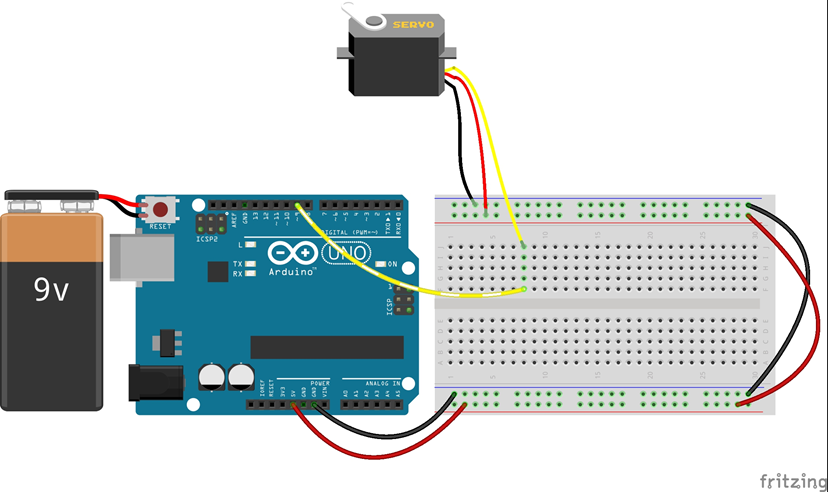
参照下图正确接线,编写程序完成一个15度递增的0-90循环旋转装置。
A实验接线图
B实验程序图

5、思考题 #
实验2 制作一个舵机跟随电位器传感器转动而转动的装置
实验3 结合温度传感器和舵机制作一个温度指示装置



